Robot in space
How are Robots Used in Space Exploration?
Historically, the role of robotics in space exploration has been significant due to the uninhabitable conditions of non-terrestrial planets in the solar system. According to AZO Robotics, a robot is defined as “a self-controlled device consisting of electronic, electrical or mechanical units that can function in place of a living agent.” In this post, you'll learn some basic history about robots in space exploration and 5 of the most popular robotics systems used in space history.
Before scientists began sending robots to space, animals such as dogs or monkeys were often sent to complete tasks and conduct experiments in order to increase human knowledge of conditions on other planets and the Moon.
As robotic technology has improved, more of these experiments and tasks have been delegated to robots rather than to living beings; in this way robotics preserves lives. While humans have set foot on the Moon, scientific knowledge of conditions on planets including Mars, Venus, Titan and Jupiter comes almost exclusively from exploration conducted by robots.
As technology progressively allows robots to reach space faster, humans are able to obtain significantly more data about conditions in space.
Related Read: 9 Best Space Podcasts for Space Geeks
Space Robot 1: Sputnik 1The first robot ever sent to space was Sputnik 1, sent by the USSR on October 4, 1957, according to NASA. Sputnik 1 was the first artificial Earth satellite and the first object created by humans to orbit Earth. The launch of Sputnik 1 marked the beginning of the notorious “space race” between the United States and the USSR. Thereafter, engineers increasingly began constructing robots to be sent to non-terrestrial planets for a variety of purposes ranging from close-up photography of planets to determination of whether other planets sustain life.
Space Robot 2: Mariner 2 and 4According to Universe Today, on December 14, 1962, the American space probe Mariner 2 became the first robotic space probe to complete a successful Venus flyby. Mariner 4, the first orbiter sent to space, then took the first proximal photos of Mars on July 14, 1965. While the role of landers is primarily to detect signs of life on planets, the role of orbiters is primarily to take photos for scientists to observe and analyze. Since the roles of these robots are different, orbiters and landers have frequently been sent to explore space in tandem.
Mariner 4, the first orbiter sent to space, then took the first proximal photos of Mars on July 14, 1965. While the role of landers is primarily to detect signs of life on planets, the role of orbiters is primarily to take photos for scientists to observe and analyze. Since the roles of these robots are different, orbiters and landers have frequently been sent to explore space in tandem.
Related Read: 5 Innovative Deep Space Companies
Space Robot 3: Viking 1 and 2
On August 20, 1975, NASA’s Viking project commenced when Viking 1 was launched to explore Mars, according to NASA. Shortly thereafter, on September 9, 1975, an identical spacecraft by the name of Viking 2 was launched with the same mission. Both spacecrafts were equipped with the same robotic technology as Mariners 2 and 4 - a lander and an orbiter. The orbiters’ roles were to photograph Mars’ surface, while the landers were to land on the planet and collect data in order for scientists to learn more about whether life exists on Mars. The orbiters from each spacecraft flew together, but the landers eventually separated to explore different regions of Mars’ surface.
The orbiters from each spacecraft flew together, but the landers eventually separated to explore different regions of Mars’ surface.
Image: Viking 1 (Via NASA JPL)
Nearly a year later, on July 20, 1976, Viking lander 1 became the first United States spacecraft to land on the surface of Mars, specifically landing in a region known as Chryse Planitia. On September 3, 1976 the Viking 2 lander touched down at a different region of the planet, known as Utopia Planitia. While the Viking mission was only expected to last 90 days after each lander touched down, both landers overstayed beyond their designed lifetimes. Viking Orbiter 1 completed 1,489 orbits, ending its mission on August 7, 1980 while
Viking Orbiter 2 concluded its mission on July 25, 1978. Both landers were powered by radioisotope thermoelectric generators which enable them to transmit information to Earth for longer time spans. Viking Lander 1’s final transmission to Earth was on November 11, 1982 while Viking Lander 2’s last transmission was April 11, 1980.
Robots exited the solar system in 1977 when Voyagers 1 and 2 were launched to study the outer solar system. According to NASA, the two robots were designed to conduct close-up studies of Jupiter and Saturn, Saturn's rings, and both Jupiter and Saturn’s largest moon. The two robots have continued on this journey for over 40 years and are presently closer to Pluto than to Earth or the sun. It was not until August 2012 that Voyager 1 entered into interstellar space, while Voyager 2 eventually followed on November 5, 2018. Both robots are still communicating information via the Deep Space Network (DSN) currently.
Space Robot 5: DextreMore recently, the Canadian Space Association launched Dextre, a robotic arm designed to “install and replace small equipment such as exterior cameras or the 100-kg batteries used on the Space Station, replace defective components in the Station's electrical systems and
test new tools and robotics techniques. ” According to the Canadian Space Agency, Dextre is technically the most advanced space robot constructed thusfar.
” According to the Canadian Space Agency, Dextre is technically the most advanced space robot constructed thusfar.
Dextre is currently operated by ground control teams from both the Canadian Space Association and NASA. Dextre’s hands alone are complete with a motorized wrench, a retractable power connector, data and video connection, camera and lights. Dextre’s hands are designed to be able to grip bulky and fragile equipment alike, making Dextre adaptable to varying conditions and projects. In 2008, Dextre was installed on the International Space Station and then launched onboard Space Shuttle Endeavour.
According to CNET, some robots currently exploring space include Dextre, Voyager 1 and 2, Hubble Space Telescope, Cassini, Robonaut 2, Rosetta, Dawn, Mars Express, Curiosity, Opportunity, 2001 Mars Odyssey, Advanced Composition Explorer, Hayabusa 2, Juno, Mars Orbiter Mission, New Horizons and more to come. Benefits of developing and sending robots to space include enriched scientific knowledge, conservation of human life, and advances in artificial intelligence technology. As technology progresses, robots increasingly serve as humans’ contemporary window to the world beyond Earth.
Benefits of developing and sending robots to space include enriched scientific knowledge, conservation of human life, and advances in artificial intelligence technology. As technology progresses, robots increasingly serve as humans’ contemporary window to the world beyond Earth.
Gregory Miller is a writer with DO Supply who covers Robotics, Artificial Intelligence, and Automation. When not writing, he enjoys hiking, rock climbing and opining about the virtues of coffee.
Sources:
- AZO Robotics: https://www.azorobotics.com/Article.aspx?ArticleID=132
- Canadian Space Agency: http://www.asc-csa.gc.ca/eng/iss/dextre/about.asp
- CNET: https://www.cnet.com/pictures/robots-that-are-in-space-right-now/
- Universe Today: https://www.universetoday.com/43750/robots-in-space/
- NASA: https://history.nasa.gov/sputnik/
- NASA: https://mars.
 nasa.gov/programmissions/missions/past/viking/
nasa.gov/programmissions/missions/past/viking/ - NASA: https://voyager.jpl.nasa.gov/mission/
Why Do We Send Robots To Space?
robotics
The Curiosity rover takes a self-portrait on a Martian sand dune. Credit: NASA/JPL-Caltech/MSSS
We can send robots to explore space without having to worry so much about their safety. Of course, we want these carefully built robots to last. We need them to stick around long enough to investigate and send us information about their destinations. But even if a robotic mission fails, the humans involved with the mission stay safe.
Sending a robot to space is also much cheaper than sending a human. Robots don’t need to eat or sleep or go to the bathroom. They can survive in space for many years and can be left out there—no need for a return trip!
Plus, robots can do lots of things that humans can’t. Some can withstand harsh conditions, like extreme temperatures or high levels of radiation.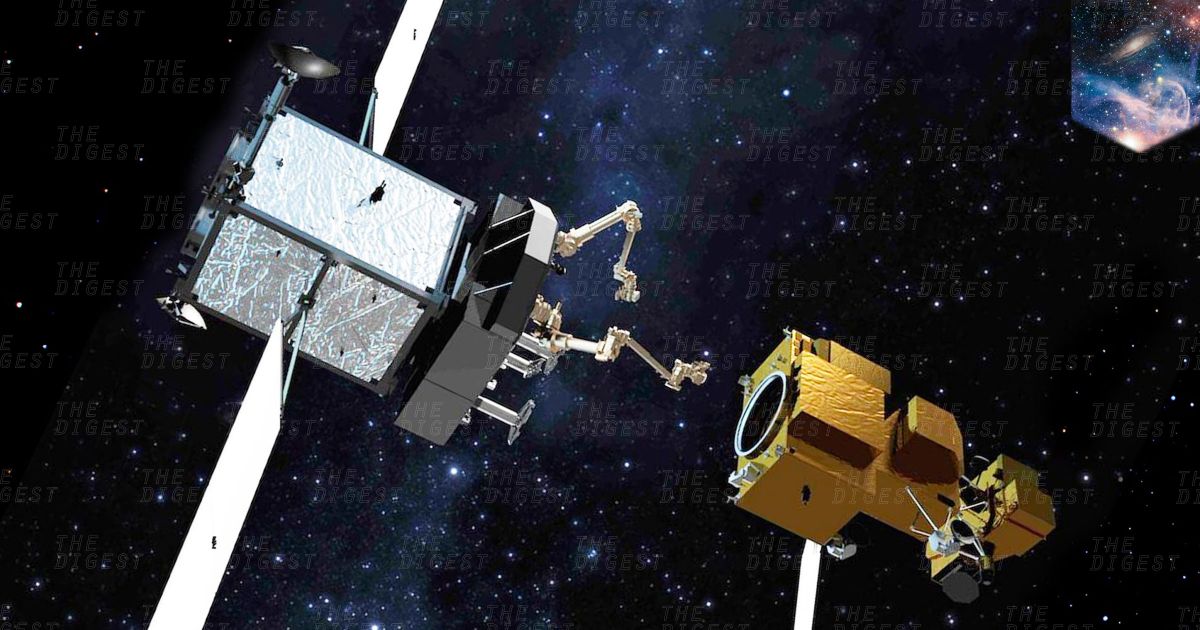 Robots can also be built to do things that would be too risky or impossible for astronauts.
Robots can also be built to do things that would be too risky or impossible for astronauts.
What are some of the robots NASA is currently developing?
You’ve probably heard of some of NASA’s robots: the Mars rovers, like Perseverance and Curiosity. But those are just a few of the most famous robots. NASA engineers are working on new robots all the time.
NASA has been investigating Mars with rovers since the Pathfinder mission landed in 1997 and deployed a small rover called Sojourner. Credit: NASA/JPL-Caltech.
One of the latest robots is nicknamed A-PUFFER, short for Autonomous Pop-Up Flat Folding Explorer Robot. The inspiration for this lightweight, two-wheeled adventurer came from origami designs. The robot can flatten itself out and duck down to investigate tight spots.
Watch this video to see Puffer in action! Video credit: NASA/JPL-Caltech
Then there’s BRUIE, the Buoyant Rover for Under-Ice Exploration. This robot can float in the water and roll its wheels along the underside of an icy surface, all while taking pictures and collecting data.
This robot can float in the water and roll its wheels along the underside of an icy surface, all while taking pictures and collecting data.
Scientists hope to someday use a robot like this to search for signs of life on icy bodies elsewhere in the solar system. For example, the underground oceans of Jupiter’s moon Europa or Saturn’s moon Enceladus.
The BRUIE robot rolls its wheels on the underside of an icy surface. Image credit: NASA/JPL-Caltech
Are all of NASA’s robots rovers?
Certainly not! Take a look at this robot, called Hedgehog.
The spiky, cube-like Hedgehog robot. Image credit: NASA/JPL-Caltech/Stanford
This spiky cube of a robot is being developed by NASA with Stanford University and MIT. Hedgehog is designed to explore small bodies, such as asteroids or comets. These have very little gravity and extremely rough terrain. Instead of rolling, Hedgehog hops and tumbles.
What if it lands upside-down? No big deal. It can operate on any of its sides. It could even get itself out of a deep crater using a tornado-like maneuver that launches the robot into the air.
It could even get itself out of a deep crater using a tornado-like maneuver that launches the robot into the air.
Does NASA make any robots that look like humans?
Yes! These are called humanoid robots. There are some tasks for which a robot that moves more like a human might be best. For example, we might like a humanoid robot to help prepare a future human settlement on Mars. With such tasks in mind, NASA’s Johnson Space Center has developed a robot named R5, or Valkyrie.
The humanoid robot, called R5, or Valkyrie. Image credit: NASA
This electric robot relies on cameras, sensors, lots of motors, and two computers. These tools help R5 to navigate its surroundings and move like a human.
Whether walking, tumbling, flying or rolling, robots have a major role to play in space exploration!
Related Resources for Educators
Classroom Activity: Design a Robotic Insect
Robotics at JPL: Precursors to Human Exploration
If you liked this, you may like:
Get your Gummy Greenhouse Gases!
Guide your spacecraft through a space maze
Hear tiny sounds with a Super Sound Cone!
90,000 space robots
Russia
Android technique (NPO Android technique), Moscow
TeleDroid, Android technique
2021. In 2020, work began on the project of a television -derogoid robot with an avatar management. It is planned to be sent to the orbital station in 2024. The robot is expected to be able to work both inside the station and on its outside.
In 2020, work began on the project of a television -derogoid robot with an avatar management. It is planned to be sent to the orbital station in 2024. The robot is expected to be able to work both inside the station and on its outside.
Fedor (FEDOR)
An anthropomorphic space robot project. To work on the ISS. It is planned to be ready for flight into space in 2021.
SAR-401, NPO Androidnaya Tekhnika, Moscow
Remote-controlled android for work in space. Remotely controlled by the operator using a repeater suit. Developed in the "beginning" of the tenth years of the XXI century. In 2016, TsNIIMash talks about plans to develop a robot for the ISS based on it, with a completion date of 2020. The development is carried out by NPO Android Technology. / Petersburg Diary
Yuri Gagarin Cosmonaut Training Center, Russia
Andronaut, Yuri Gagarin Cosmonaut Training Center, Russia
Remote controlled android for work on orbital space stations.
TsNII RTK, Moscow
KTMS-1, TsNII RTK, Moscow
Space transport and handling system for performing technological operations on the outer surface of spacecraft and supporting the crew during extravehicular activities. For work in the spacecraft or on the surface of the spacecraft. The abbreviation KTMS-1 was introduced by RoboTrends.ru for the convenience of referring to the system.
Energia (RKK Energia), NPO Androidnaya Tekhnika, Central Research Institute RTK, Russia
Kosmobot, RSC Energia, NPO Androidnaya Tekhnika, Central Research Institute RTK, Russia 90RK003
announced plans to create a mobile robot that can be operated on the Russian segment of the ISS in the period from 2020 to 2024. The corresponding tender was won by RSC Energia in cooperation with NPO Androidnaya Tekhnika and the Central Research Institute of the RTK. Previously, as you know, the "Android Technology" created a robot avatar SAR-401. The mobile robot is planned to be used on board the scientific and energy module (SEM) under construction. One can argue about the practical usefulness of such a robot at the station; rather, we are talking about testing the operation of robotic devices in space - and this, of course, needs to be done, given the prospects for space exploration with the help of autonomous robots. There are already a lot of "space robots" for working on the ISS in development. But in reality, so far only the American Robonaut 2 has flown to the ISS.
The mobile robot is planned to be used on board the scientific and energy module (SEM) under construction. One can argue about the practical usefulness of such a robot at the station; rather, we are talking about testing the operation of robotic devices in space - and this, of course, needs to be done, given the prospects for space exploration with the help of autonomous robots. There are already a lot of "space robots" for working on the ISS in development. But in reality, so far only the American Robonaut 2 has flown to the ISS.
MASTER
Network of Russian fully robotic MASTER telescopes.
Foreign
Australia
Siding Observatory, Australia
Telescope Robot for automated information on space environment
9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 000 android with the ability to work in space
2015. 07.19 A European robot named AILA can become the second android in space after the American Robonaut 2, which is currently working on the ISS. AILA was developed by the Robotics Innovation Center (German Research Center for Artificial Intelligence) and the Robotics Group at the University of Bremen, Germany. Now AILA is being trained to work on the ISS on the layout of the Columbus module.
07.19 A European robot named AILA can become the second android in space after the American Robonaut 2, which is currently working on the ISS. AILA was developed by the Robotics Innovation Center (German Research Center for Artificial Intelligence) and the Robotics Group at the University of Bremen, Germany. Now AILA is being trained to work on the ISS on the layout of the Columbus module.
EU
ERA, EU
2021.11 The Nauka module is already in orbit as part of the ISS. Russian cosmonauts worked out on Earth at the CTC the procedure for transferring the radiator from the Rassvet module simulator to the Nauka module simulator using the Don-ERA robotic manipulator simulator. It is planned to perform this operation in orbit in the summer of 2022.
2018. Robotic arm 11.3 m long and weighing 600 kg. It should work on the Nauka module, which is planned to be launched to the ISS. The launch dates for the Russian module have been postponed several times, and in 2018 we are talking about November 2019. / 3dnews.ru 2018.06.12
The launch dates for the Russian module have been postponed several times, and in 2018 we are talking about November 2019. / 3dnews.ru 2018.06.12
Philae, Europe
A robot probe designed for automated research of comet 67P/Chyuryumov-Gerasimenko. Weight - about 100 kg. Landing on a comet - 11/12/2014. Delivered by the Rosetta spacecraft. After 60 hours of battery life, the robot went into sleep mode. After almost 7 months of "sleep", on June 14, 2015, the robot recharged as the comet approached the Sun and is ready for further experiments.
India
Vyimmitra, India
"Vemmitra", an Indian semi-android robot. Upper body only, no legs. He is expected to be on board the Indian spacecraft during the first unmanned flight. The robot will be a "woman" and will speak two languages.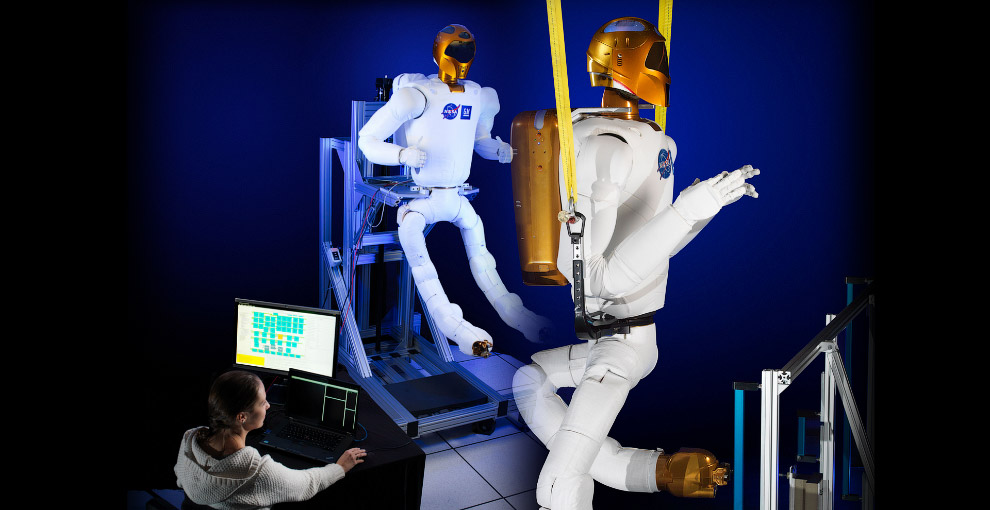 Introduced in January 2020.
Introduced in January 2020.
Canada
Canadarm2, Canada
Another name is Dextre.
Dextre, MDA Space Missions, a division of MacDonald Dettwiler, commissioned by the Canadian Space Agency, Canada
ISS Surface Loader. Remotely controlled by the operator, including the operator of the ground control center.
China
China Aerospace Science and Technology Corp., China
Xiaotian, China Aerospace Science and Technology Corp., China
space research robot aboard orbital stations and in open space.
2015.11.08 Chinese space robot Xiaotian is based on a Marvel superhero?
USA
NASA, USA
ASTROBEE, NASA, USA
FREE FREE FREE COUBOT in the form of a small cube with rounded faces for use for ISS (on the figure - concept) . In development with plans for readiness in 2017. NASA is hosting a crowdsourced competition for a robotic arm project. The robot will be equipped with a camera, microphone, RFID scanner. Tasks on board: monitoring air quality, noise levels, as well as performing a number of tasks in order to reduce the workload on astronauts. In addition, the robot will help with testing new technologies and will act as a telepresence robot for mission control specialists in Houston.
In development with plans for readiness in 2017. NASA is hosting a crowdsourced competition for a robotic arm project. The robot will be equipped with a camera, microphone, RFID scanner. Tasks on board: monitoring air quality, noise levels, as well as performing a number of tasks in order to reduce the workload on astronauts. In addition, the robot will help with testing new technologies and will act as a telepresence robot for mission control specialists in Houston.
Biobot
2018. NASA funded project in 2018. Within its framework, a small-sized robot is created, the task of which is to act as a companion of a human astronaut, to transport part of the astronaut's life support system. Such an approach is expected to increase the astronaut's autonomous stay on the surface of other planets without the need to return to the base to replenish resources. Initial funding amount - $125,000
Clipper, NASA, USA
Jupiter moon Europa exploration project. In 2016, $30 million will be spent on it. The goal is to search for signs of habitability. The planned launch time is 2025.
In 2016, $30 million will be spent on it. The goal is to search for signs of habitability. The planned launch time is 2025.
Curiosity, NASA, USA
MARSO, operates on Mars for 2015.05
Insight, USA
In May 2015, tests of the NASA of the Marcian Institute of the Insight Martin on the LockHED Base. Video. Tasks: to study the seismic of Mars, the temperature regime at depths of up to 5 meters, to identify the distribution of masses in the center of the planet, to study the size, density and general structure of Mars, the core, mantle and crust.
2015.05.29 NASA is testing the new Insight rover.
K-REX, NASA, USA
Lunar surface robot with AI elements and cognitive abilities. It will have to find convenient routes for moving along the rugged surface of our satellite. "Knows" the basic laws of physics and applies them to choose the best safe route.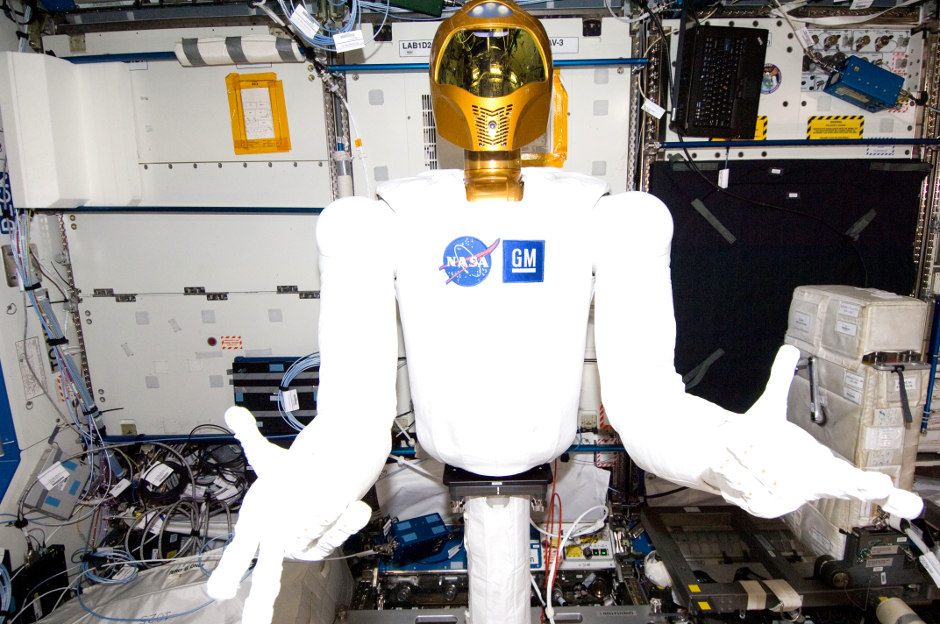 So far, he cannot change plans in the course of their execution - i.e. draws up a program in advance and then follows it.
So far, he cannot change plans in the course of their execution - i.e. draws up a program in advance and then follows it.
2016.05.23 The robot surprised people with its creative approach.
Mars 2020, NASA, USA
A rover dedicated to research on Mars starting in 2021. The rover will be built with Curiosity's expertise in mind and using a number of its nodes. The novelty will receive a number of new sensors and other tasks. In particular, the robot will collect soil samples, check them for traces of microbial life. The new rover will change the design of the wheels, they will become stronger than those of Curiosity. The landing pattern of the rover on Mars will change.
Marsbee
A 2018 NASA-funded project to create a swarm of flying robot bees that could help astronauts explore Mars. The initial funding amount is $125 thousand
Opportunity, USA
MER-B (Mars Exploration Rover - B).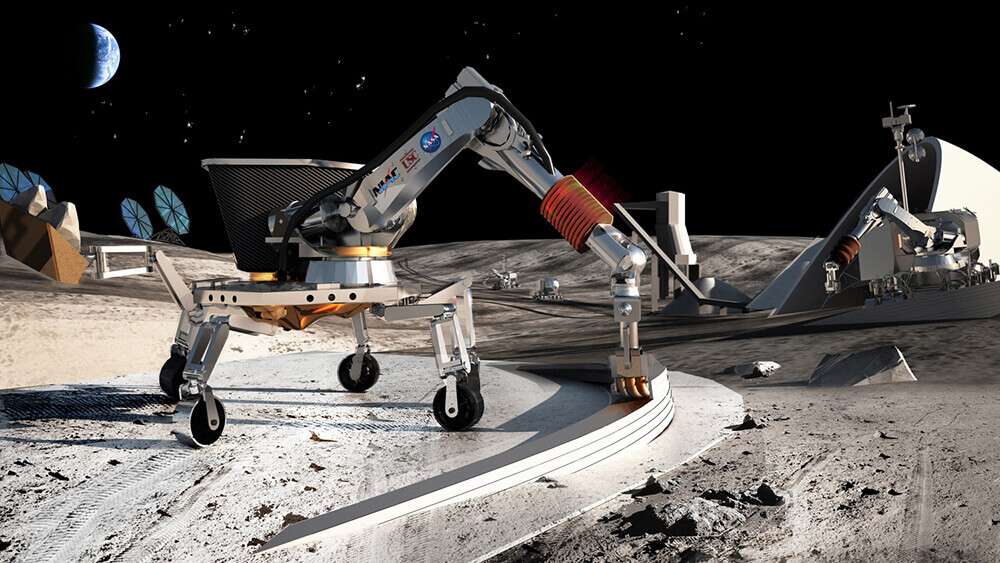 Unmanned rover - rover. Began work on the surface of Mars in 2004. Remains active in 2015.
Unmanned rover - rover. Began work on the surface of Mars in 2004. Remains active in 2015.
R5, NASA/DARPA, USA
Robot for use in space, on the Moon, on Mars. With two legs and the ability to walk. As of 2015.11 in development.
Shapeshifter
A 2018 NASA-funded project that involves creating a group of robots that can combine into different shapes. This will allow them to explore the surface of Titan (a moon of Saturn). Initial funding amount - $125 thousand0003
2017.05.15 Archinaut - construction in orbit. Made In Space demonstrates a video rendering of a larger system, the Archinaut technology platform, which enables autonomous production and assembly of space systems in orbit. Archinaut will eventually be able to manufacture and assemble large equipment such as satellites or even a space station. The project is based on the use of additive technologies.
2016.03.08 Robotic 3D printer capable of building space objects. And also print what is required on board the ISS.
And also print what is required on board the ISS.
Stone Aerospace, USA
DEPTH, Stone Aerospace, USA
Deep Phreatic Thermal Explorer. The so-called "cryobot". NASA commissioned development of an autonomous research robot capable of drilling the icy surface of Europa. It has a built-in power source and laser light emitting diodes that allow it to melt ice so that the robot can move under Europa's ice shell. The device is equipped with an underwater vehicle ARTEMIS (Autonomous Rover / airborne-radar Transects of the Environment Beneath the McMurdo Ice Shelf) - a prototype probe capable of exploring thermal springs.
2015.06.15 Drilling robot will be able to explore ice satellites.
Robonaut 2 or R2, General Motors and NASA with the assistance of Oceaneering Space Systems, USA
photo: NASA
The evolution of the Robonaut project. The Robonaut program started in 1997. It was planned that it would be possible to test the robot in space as early as 2005. In 2014, he was selected as a NASA Government Invention. Official page of Robonaut 2.
The Robonaut program started in 1997. It was planned that it would be possible to test the robot in space as early as 2005. In 2014, he was selected as a NASA Government Invention. Official page of Robonaut 2.
2015.06.21 Robonaut 2 appeared on the ISS. The robot is planned to be used for "medical tasks" under the control of doctors located on Earth. The goal of the program is to offload repetitive work to the robot.
2015.06.21 NASA has a robot in International Space Station.
Stone Aerospace, USA
VALKYRIE, Stone Aerospace, USA
Very deep Autonomous Laser-powered Kilowatt-class Yo-yoing Robotic Ice Explorer, developed by Stone Aerospace as part of a NASA project. Development of the ideas of the DEPTHX research robot for the exploration of Europa, a satellite of Jupiter. Unlike the prototype, this robot has an external energy source and can be left on the surface, the laser beam for drilling ice goes to the robot via an ultra-thin optical fiber. In 2015, the laser power is 5 kW, by the time of the flight to Europe, the laser power is expected to reach 250 kW. The idea is that the robot, once on the surface of Europa, will drill ice. In 2014, VALKYRIE descended to a depth of 31 meters in the Matanuska Glacier in Alaska in tests.
In 2015, the laser power is 5 kW, by the time of the flight to Europe, the laser power is expected to reach 250 kW. The idea is that the robot, once on the surface of Europa, will drill ice. In 2014, VALKYRIE descended to a depth of 31 meters in the Matanuska Glacier in Alaska in tests.
2015.06.15 Drilling robot will be able to explore ice satellites.
X-37B, USA
photo: United States Air Force
unmanned space shuttle (Orbital Test Vehicle-4). The shuttle measures 2.9m high and 8.9m long. The device is able to move in space thanks to a jet engine.
2017.05.07 The X-37 unmanned orbital shuttle returned to Earth after a flight of 2 years, landing at the Kennedy Space Center in Cape Canaveral. The Pentagon does not disclose the purpose of the flight (it was only mentioned to test the operation of ion microjet engines and the properties of materials in space).
XS-1, DARPA, USA
Read more in the Space Chelnks section
Japan
GITAI, Japan
2021. 11 on the ISS was tested for the universal robot for cosmos Giti S1, developed by startup GITAI, Japan. The tests were carried out for 3 days, from October 13 to October 16, 2021. NASA delivered the robot into orbit. The astronauts mounted the robot in the Nonorack Bishop Airlock. The robot successfully coped with the solutions of two tasks included in the test program, in particular, it mounted, assembled, connected the elements of the gateway control panel, and connected cable connections. The robot also interacted with the elements of the control panel. Basically, the robot coped with the task on its own, in some cases it was remotely assisted by specialists from the module control center from Houston. The GITAI S1 robot is an android-type robot (torso with two manipulator arms), but this time only one of its "arms" flew into orbit. VIDEO.
11 on the ISS was tested for the universal robot for cosmos Giti S1, developed by startup GITAI, Japan. The tests were carried out for 3 days, from October 13 to October 16, 2021. NASA delivered the robot into orbit. The astronauts mounted the robot in the Nonorack Bishop Airlock. The robot successfully coped with the solutions of two tasks included in the test program, in particular, it mounted, assembled, connected the elements of the gateway control panel, and connected cable connections. The robot also interacted with the elements of the control panel. Basically, the robot coped with the task on its own, in some cases it was remotely assisted by specialists from the module control center from Houston. The GITAI S1 robot is an android-type robot (torso with two manipulator arms), but this time only one of its "arms" flew into orbit. VIDEO.
Japan Aerospace Exploration Agency, Japan
HTV, Japan Aerospace Exploration Agency, Japan
H-II Transfer Vehicle, a Japanese unmanned automatic cargo spacecraft developed by the Japan Aerospace Exploration Agency. Development and construction cost $680 million. Length - about 10 meters, maximum diameter - 4.4 m, weight - 10.5 tons, payload - up to 6 tons, autonomous flight - up to 100 hours. Disposable, after the delivery of cargo to the ISS, it deorbits and ceases to exist. It does not have auto-docking capabilities with the ISS; docking is provided by the Dextre robotic arm, Canada, installed on the ISS.
Development and construction cost $680 million. Length - about 10 meters, maximum diameter - 4.4 m, weight - 10.5 tons, payload - up to 6 tons, autonomous flight - up to 100 hours. Disposable, after the delivery of cargo to the ISS, it deorbits and ceases to exist. It does not have auto-docking capabilities with the ISS; docking is provided by the Dextre robotic arm, Canada, installed on the ISS.
Country unknown
SPHERES
Autonomous drone for use in manned space orbital stations.
SpiderFab
Space robot concept.
2013.09.03 SpiderFab: Architecture for On-Orbit Construction of Kilometer-Scale Apertus
"Roskosmos" for the first time showed a robot for work in open space
https://ria.ru/20220207/robot-1771512246.html
Roskosmos first showed a robot to work in outer space
Roscosmos first showed a robot to work in outer space
"Roskosmos" for the first time showed a robot for work in outer space
"Roskosmos" for the first time showed an anthropomorphic robot of a new generation "Teledroid" designed for work in outer space. Photos and videos, as well as ... RIA Novosti, 07.02.2022
Photos and videos, as well as ... RIA Novosti, 07.02.2022
2022-02-07T16: 44
2022-02-07T16: 44
2022-02-07T19: 22
Science
Cosmos-RIA Science
Aleksey Ovchinin
9000Russia
Russia
Russia
Advanced Research Foundation
EMERCOM of Russia (Ministry of the Russian Federation for Civil Defense, Emergencies and Disaster Relief)
/html/head/meta[@name='og:title']/@content
/html /head/meta[@name='og:description']/@content
https://cdnn21.img.ria.ru/images/07e6/02/07/1771522121_0:0:1920:1080_1920x0_80_0_0_bb9f455ce387fa8587d8865137922bd6.jpg Roskosmos for the first time showed the anthropomorphic robot of the new generation Teledroid, designed to work in outer space. Photos and videos, as well as a 3D model of the robot, were posted on the website of the state corporation. Earlier it was reported about plans to launch Teledroid on the ISS in 2024. The experiments that are supposed to be carried out with it at the station will allow to get the groundwork for creating robots that will work on the Moon and circumlunar orbit. The "teledroid" outwardly resembles a human torso. It will function in avatar mode, copying the movements of an operator in a special suit, located on the ISS or in the Mission Control Center. The robot will be able to perform some typical operations on its own. As Dmitry Rogozin, the general director of Roscosmos, later said, the footage showed a dimensional layout made of plastic - polyamide. With its help, specialists should check how best to place the robot in the ship during transportation to the ISS, as well as conduct ergonomic studies when performing joint operations with astronauts. According to Rogozin, a model is also being made for testing in the hydro laboratory, and the current sample should appear in 2023 in order to pass tests before being sent to the station, including on a vibration stand and for electromagnetic compatibility. In 2019The robot Fedor has already been in orbit this year. On the Soyuz MS-14 spacecraft, in the central seat of the ship's commander, he arrived at the ISS, where he was tested by Russian cosmonauts Alexei Ovchinin and Alexander Skvortsov.
The "teledroid" outwardly resembles a human torso. It will function in avatar mode, copying the movements of an operator in a special suit, located on the ISS or in the Mission Control Center. The robot will be able to perform some typical operations on its own. As Dmitry Rogozin, the general director of Roscosmos, later said, the footage showed a dimensional layout made of plastic - polyamide. With its help, specialists should check how best to place the robot in the ship during transportation to the ISS, as well as conduct ergonomic studies when performing joint operations with astronauts. According to Rogozin, a model is also being made for testing in the hydro laboratory, and the current sample should appear in 2023 in order to pass tests before being sent to the station, including on a vibration stand and for electromagnetic compatibility. In 2019The robot Fedor has already been in orbit this year. On the Soyuz MS-14 spacecraft, in the central seat of the ship's commander, he arrived at the ISS, where he was tested by Russian cosmonauts Alexei Ovchinin and Alexander Skvortsov. The robot worked with a screwdriver, wrenches and docked electrical connectors, as well as turning on a drill and wiping its hands with a towel. In addition, the cosmonauts interrogated Fyodor, asking more than 30 questions and recording his answers on video. FEDOR (callsign Skybot F-850) is an anthropomorphic rescue robot developed by Androidnaya Tekhnika NPO and the Advanced Research Foundation by order of the Russian Emergencies Ministry.
The robot worked with a screwdriver, wrenches and docked electrical connectors, as well as turning on a drill and wiping its hands with a towel. In addition, the cosmonauts interrogated Fyodor, asking more than 30 questions and recording his answers on video. FEDOR (callsign Skybot F-850) is an anthropomorphic rescue robot developed by Androidnaya Tekhnika NPO and the Advanced Research Foundation by order of the Russian Emergencies Ministry.
https://ria.ru/20220111/robot-1767289527.html
Moon
Russia
RIA Novosti
1
9000 54.7
9000
Internet.ru
7 495 645-6601Federal State Unitary Enterprise MIA Russia Today
https: //xn---c1acbl2abdlkab1og.xn--p1ai/Awards/
2022
RIA Novosti
1
5
4.7 9000 9000 9000 96 96 96 96 96
7 495 645-6601
Rossiya Segodnya
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
/docs/about/copyright. html
html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
RIA Novosti
1
5
4.7
internet@
internet@
7 495 645-6601
Rossiya Segodnya
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
New Russian droid for outdoor space
in Roscosmos showed the first frames of how the new Russian droid for open space
2022-02-07T16: 44
True
PT0M51S
1920 9000 9000 1080
true
1920
1440
true
https://cdnn21.img.ria.ru/images/07e6/02/07/1771522121_240:0:1680:1080_1920x0_80_0_0_1a3b2defec5a51a10d5e2be54de9da1f.jpg
1920
1920
True
RIA Novosti
1
5
4.7
9000
7 495 645-6601 9000
Federal State Unitary Enterprise MIA “Russia Today”
https: //xn---c1acbl2abdlkab1og.xn--p1ai/Awards/
RIA Novosti
1
5
4. 7
7
96 9000
7 495 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 646 646 495 64 64 64 646 646 495 64 64 64 64 64 64 64 64 64 64 64 64 64 646 646 495 64 646 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64 64AP
Federal State Unitary Enterprise MIA "Russia Today"
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
space - ria science, alexey ovchinin, alexander skvortsov, moon, russia, advanced research fund, ministry of emergency situations of russia (ministry of the russian federation for civil defense, emergency disaster management), mission control center, international space station (ISS), Fedor robot (fedor - final experimental demonstration object research)
Science, Space - RIA Nauka, Alexey Ovchinin, Alexander Skvortsov, Luna, Russia advanced research, EMERCOM of Russia (Ministry of the Russian Federation for Civil Defense, Emergencies and Disaster Relief), Mission Control Center, International Space Station (ISS), Robot Fedor (FEDOR - Final Experimental Demonstration Object Research)
MOSCOW, February 7 - RIA Novosti. "Roskosmos" for the first time showed a new generation of anthropomorphic robot "Teledroid", designed for work in outer space. Photos and videos, as well as a 3D model of the robot, were posted on the state corporation's website.
"Roskosmos" for the first time showed a new generation of anthropomorphic robot "Teledroid", designed for work in outer space. Photos and videos, as well as a 3D model of the robot, were posted on the state corporation's website.
Plans were previously reported to launch Teledroid to the ISS in 2024. The experiments that are supposed to be carried out with him at the station will provide a groundwork for creating robots that will work on the Moon and lunar orbit.
The Teledroid looks like a human torso. It will function in avatar mode, copying the movements of an operator in a special suit, located on the ISS or in the Mission Control Center. The robot will be able to perform some typical operations independently.
As Dmitry Rogozin, general director of Roskosmos, later said, the footage showed an overall layout made of plastic - polyamide. With its help, specialists should check how best to place the robot in the ship during transportation to the ISS, as well as conduct ergonomic studies when performing joint operations with astronauts.